●電気泳動
電気泳動はごく普通に行う。電気泳動の装置はバイオクラフト社の特注製を使っている(カタログにはもう掲載されています)。A4サイズのゲルを使う場合は、ゲル作成ボックスも電気泳動装置もCytivaのものが使用できる。まずはA4サイズのゲルから実験を始める方がいいかもしれない。今まで手のひらサイズで実験をされていた方であれば、それだけで解像度の高さに驚かれるだろう。
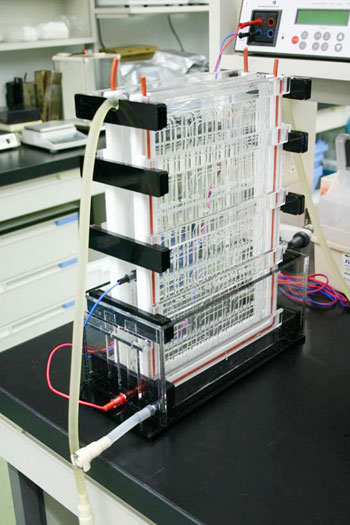
図18 設置前のガラス板
2枚がけの電気泳動装置。こういうのが6台ないし12台並ぶと少々スペースを使ってしまう。A4サイズのゲルであればEttan™ DALTtwelve Large Electrophoresis Systemを使ってコンパクトに1台で12枚を同時泳動することができる。
●電気泳動終了後
電気泳動終了後はレーザースキャナーでゲルをスキャンして画像を取得する。12枚の電気泳動を一晩かけて行う、と書くとスループット性が低いではないか、と思われるかもしれない。しかし、1枚あたりに換算すれば1時間強である。24枚の同時泳動を行えば1枚あたりにかかる時間はさらにその半分。電気泳動は一次元目、二次元目を平行して行うことができるので、1ヶ月にこなせるサンプルの数として計算すれば二次元電気泳動法はそれほど遅い実験ではない。「50検体をトリプリケートで150枚の電気泳動」という実験で、標準的には1ヶ月ほどかかるだろうか。
図19 泳動終了後のゲル
電気泳動終了後のゲルをこれからレーザースキャナーでスキャンする。1時間以内にスキャン終了。
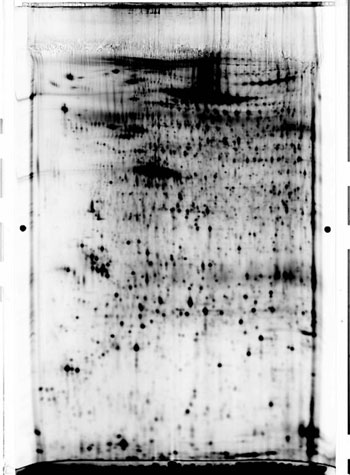
図20 スキャナーで取り込んだゲル画像
100 µgのタンパク質を全量サチュレーションダイで標識して電気泳動した。サチュレーションダイは高感度なので通常の解析はタンパク質は1 µgあれば十分なのだが、分取用となると量が必要なので100 µgをラベルして電気泳動している。ラベルすることで泳動度が変わるので、全量をラベルする必要がある。
●ピックリストの作成
スキャナーで取り込んだ画像を画像解析ソフトで開き、回収したいスポットをリストにする。具体的には、マーカーシールを起点としてそれぞれのスポットがどのような座標にあるのかをソフトが判断し、記録していく。スポットを指定すれば自動的に行われることなので、あまり深く考えることはない。リストの作成の仕方はソフトウェアごとに異なっているので、それぞれのマニュアルを参照されたい。今回スクリーンショットでお見せするのはnonlinear dynamicsのProgenesis SameSpots(スクラム社)である。Cytiva製のDeCyder™ 2D Softwareでもまったく問題なくスポットのリストを作成することができる。両方のソフトウェアを比べてみると、スポットのリスト作成についてはDeCyder™ 2D Software の方が便利な印象がある。
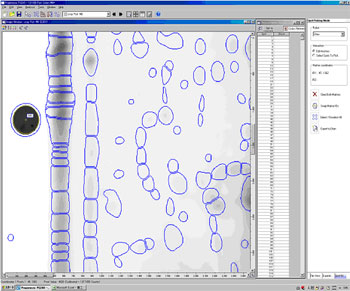
図21 マーカーシグナルの認識
まずはマーカーシールのシグナル(左端の大きなスポット)をマーカーとしてソフトウェアに認識させる。両側のマーカーシールについて同じように行う。平面で2つの原点を決めれば他のすべてのスポットの座標は自動的に決まるという理屈である。
図22 注ぎ込んだゲル溶液を横からみたところ
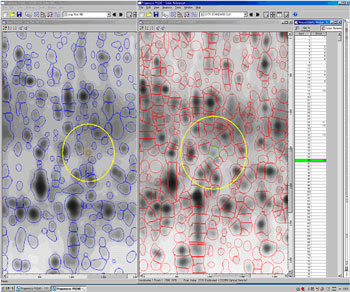
すでに電気泳動が終わって画像として保存してある解析用のゲルのイメージを表示させ(右)、今回分取用にあらためて泳動したゲルのイメージ(左)と比較する。右の解析ゲルで同定したタンパク質同定をしたいスポットが分取ゲルではどこにあるか、画像ソフトウェアを使って特定する。
この図では、解析ゲル上のスポットが緑の枠で、分取ゲル上の対応するスポットがオレンジの枠で囲まれている。スポットを選択すると自動的にそのスポットの座標が記録されるようにソフトウェアが作られている。
詳細はソフトウェアごとに異なるが原理は共通している。すなわち、マーカーシールの位置を読み取り、そこを起点として座標軸を作り、回収したいスポットの位置を決める、ということである。