DIGE 道場 第8回
ロボットを使ったスポットの回収
第8回 もくじ
- はじめに
- スポットの回収になぜロボットは有用か
- ロボットを使ったスポット回収の実際(1) ガラス板のコーティング処理
- ロボットを使ったスポット回収の実際(2) ゲルの作製
- ロボットを使ったスポット回収の実際(3) 電気泳動からピックリストの作成まで
- ロボットを使ったスポット回収の実際(4) 分取ロボットによるスポット回収 (本ページ)
- 最後に
Dr. 近藤のコラム
 コラム第8回 「二次元電気泳動の標準化」 コラム第8回 「二次元電気泳動の標準化」
5. ロボットを使ったスポット回収の実際(4) 分取ロボットによるスポット回収
図23 ロボット設置前のガラス板
写っている色はフリーの蛍光色素である。これから片側のガラス板をはずす。片側のガラス板をはずした状態では言うまでもなくケラチンがコンタミしやすいので、ここからロボットへの設置はできるだけ迅速に行う。
「迅速に」とあせってしまいピントがずれてしまった。
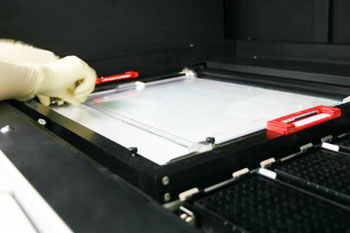
図24 ロボットによるスポット回収(1)
まずトレイにガラス板をセットする。専用デバイスを使ってガラス板が動かないように固定する。
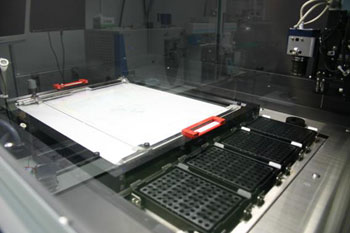
図25 ロボットによるスポット回収(2)
次に、乾燥を防ぐためにトレイに超純水を入れる。これがアズワン社製の機械。
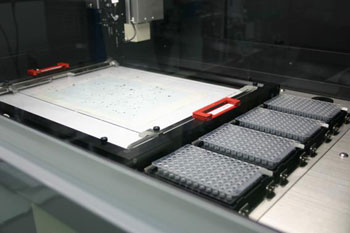
図26 ロボットによるスポット回収(3)
ガラス板の設定終了。これから隣の台に96穴プレート並べ、ロボットを作動させる。右上にあるアームについたカメラでマーカーシールを認識し、そこを起点としてスポットの座標を規定し、回収していく。
難しいように思われるかもしれないが、PC上の操作なのでここは簡単。カメラの隣にあるのがピック用のヘッドである。
図27 ロボットによるスポット回収(4)
スポット回収を行っているところ。動画でないのが残念。4枚の96穴プレートがセットされている。プレートが足りなくなったら機械は自動的に止まるため、手動でプレートを入れ替える。
図28 ロボットによるスポット回収(5)
96穴プレートをセットする台は引き出し式になっている。ケラチンのコンタミを避けるためである。96穴プレートを1枚分ずつ引き出してアルミのシールでふたをしていく。回収したスポットは96穴プレートに入れたままの状態で-20℃保存する。
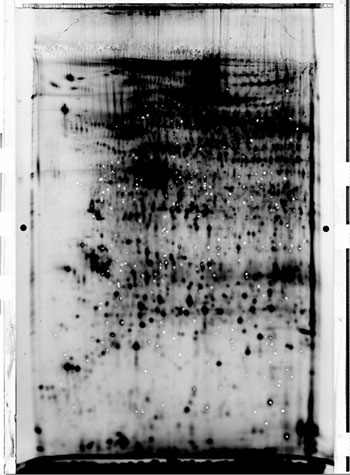
図29 スポット回収後のゲル画像
狙ったところが回収されていることを確認する。
次へ 最後に
このページのトップに戻る
DIGE道場トップページへ
|